Probabilistic neural networks#
Last Modified: 07-04-2021
Authors: Sam Budd
Tutorial: Use probabilistic Flood extent segmentation models to measure Flood event uncertainty
Step 0: Notebook setup#
- Configure notebook basics
- Configure GCP Credentials
import sys, os
from pathlib import Path
%load_ext autoreload
%autoreload 2
Step 1: Setup Configuration file#
- Load configuration file from local device or gcs
from ml4floods.models.config_setup import get_default_config
import pkg_resources
# Set filepath to configuration files
# config_fp = 'path/to/worldfloods_template.json'
config_fp = pkg_resources.resource_filename("ml4floods","models/configurations/worldfloods_uncertainty.json")
# config_fp = os.path.join(root, 'src', 'models', 'configurations', 'worldfloods_template.json')
config = get_default_config(config_fp)
Loaded Config for experiment: worldfloods_uncertainty_demo
{ 'data_params': { 'batch_size': 32,
'bucket_id': 'ml4floods',
'channel_configuration': 'all',
'filter_windows': { 'apply': False,
'threshold_clouds': 0.8,
'version': 'v1'},
'input_folder': 'S2',
'loader_type': 'local',
'num_workers': 8,
'path_to_splits': '/worldfloods/public',
'target_folder': 'gt',
'test_transformation': {'normalize': True},
'train_test_split_file': 'worldfloods/public/train_test_split.json',
'train_transformation': {'normalize': True},
'window_size': [256, 256]},
'deploy': False,
'experiment_name': 'worldfloods_uncertainty_demo',
'gpus': '0',
'model_params': { 'hyperparameters': { 'channel_configuration': 'all',
'label_names': [ 'land',
'water',
'cloud'],
'lr': 0.0001,
'lr_decay': 0.5,
'lr_patience': 2,
'max_epochs': 40,
'max_tile_size': 256,
'model_type': 'unet_dropout',
'num_channels': 13,
'num_classes': 3,
'val_every': 1,
'weight_per_class': [ 1.93445299,
36.60054169,
2.19400729]},
'model_folder': 'gs://ml4cc_data_lake/0_DEV/2_Mart/2_MLModelMart',
'path_to_weights': 'checkpoints/',
'test': True,
'train': True,
'use_pretrained_weights': False},
'resume_from_checkpoint': False,
'seed': 12,
'test': False,
'train': False}
Step 2: Setup Dataloader#
- 'loader_type' can be one of 'local' which assumes the images are already saved locally, or 'bucket' which will load images directly from the bucket specified in 'bucket_id'
from ml4floods.models import dataset_setup
config.data_params.loader_type = 'local'
config.data_params.path_to_splits = "/worldfloods/public" # local folder to download the data
config.data_params["download"] = {"train": False, "val": False, "test": True} # download only test data
data_module = dataset_setup.get_dataset(config.data_params)
# Get just the test dataloader
dl = data_module.test_dataloader()
Using local dataset for this run
train 89741 tiles
val 1284 tiles
test 11 tiles
Step 3: Load a pre-trained model or checkpoint#
- Currently models that support probabilistic segmentation include:
1. 'unet_dropout' which achieves probabilistic segmentation via dropout during inference
from pytorch_lightning.utilities.cloud_io import load
from ml4floods.models.model_setup import get_model
import torch
print('Model type: ', config.model_params.hyperparameters.model_type)
path_to_models = f"{config.model_params.model_folder}/{config.experiment_name}/model.pt"
# Load probabilistic version of model for sampling varying predictions
prob_model = get_model(config.model_params)
prob_model.load_state_dict(load(path_to_models))
prob_model.to(torch.device("cuda:0"))
# Load deterministic version of model for sampling consistent predictions
det_model = get_model(config.model_params)
det_model.load_state_dict(load(path_to_models))
det_model.to(torch.device("cuda:0"))
Model type: unet_dropout
WorldFloodsModel(
(network): UNet_dropout(
(dconv_down1): Sequential(
(0): Conv2d(13, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU(inplace=True)
(2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(3): ReLU(inplace=True)
)
(dconv_down2): Sequential(
(0): Conv2d(64, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU(inplace=True)
(2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(3): ReLU(inplace=True)
)
(dconv_down3): Sequential(
(0): Conv2d(128, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU(inplace=True)
(2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(3): ReLU(inplace=True)
)
(dconv_down4): Sequential(
(0): Conv2d(256, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU(inplace=True)
(2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(3): ReLU(inplace=True)
)
(maxpool): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(dconv_up3): Sequential(
(0): Conv2d(768, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU(inplace=True)
(2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(3): ReLU(inplace=True)
)
(dconv_up2): Sequential(
(0): Conv2d(384, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU(inplace=True)
(2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(3): ReLU(inplace=True)
)
(dconv_up1): Sequential(
(0): Conv2d(192, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU(inplace=True)
(2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(3): ReLU(inplace=True)
)
(dropout): Dropout2d(p=0.5, inplace=False)
(conv_last): Conv2d(64, 3, kernel_size=(1, 1), stride=(1, 1))
)
)
Step 4: Get Inference Function for model#
-- This handles tiling and padded prediction over large images and enables us to query multiple samples from the network to obtain uncertainty estimates
-- eval_mode=False enables dropout during inference to give us probabilistic samples from the network
from ml4floods.models.model_setup import get_model_inference_function
# Get probabilistic and deterministic inference functions
prob_inference_function = get_model_inference_function(prob_model, config, apply_normalization=False, eval_mode=False)
det_inference_function = get_model_inference_function(det_model, config, apply_normalization=False, eval_mode=True)
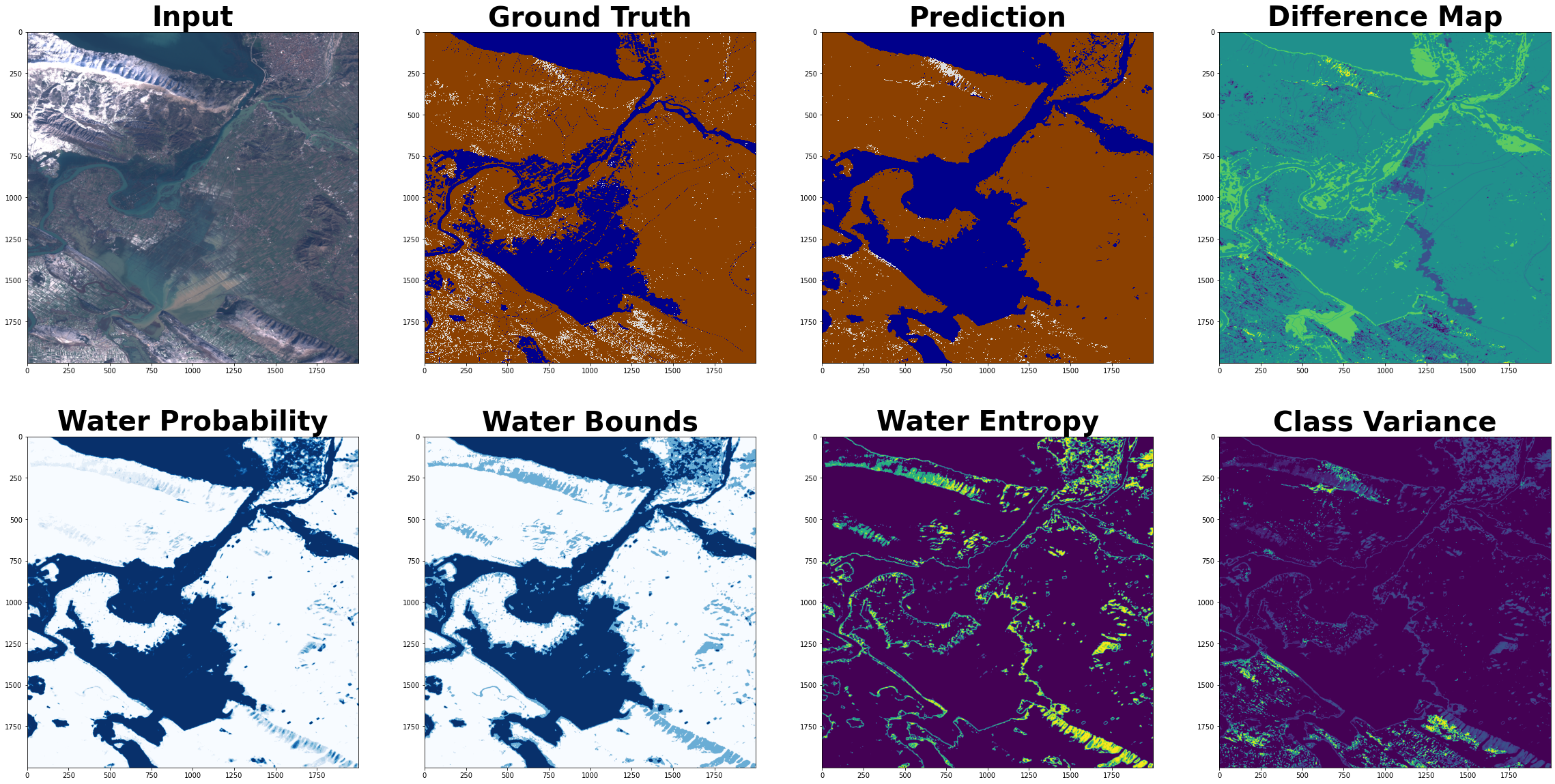
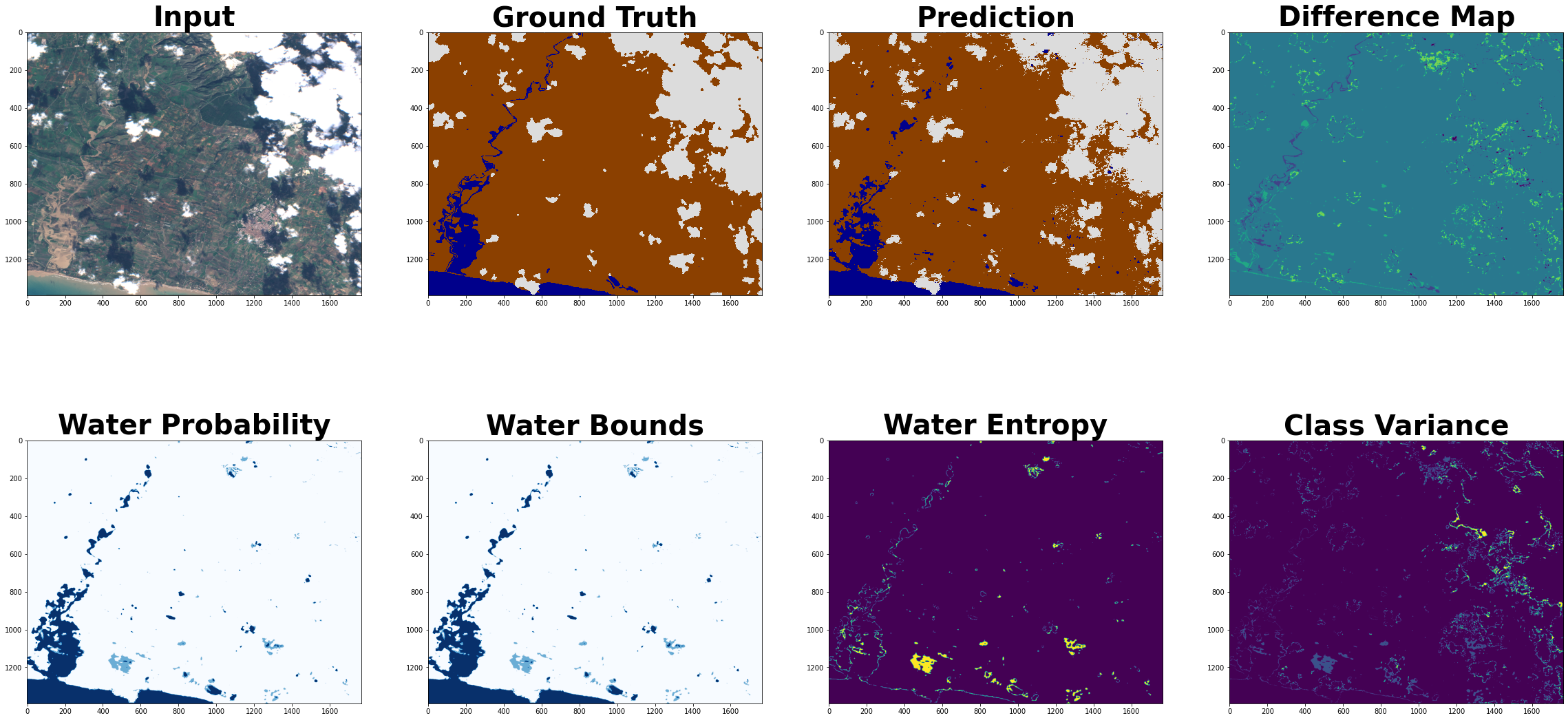
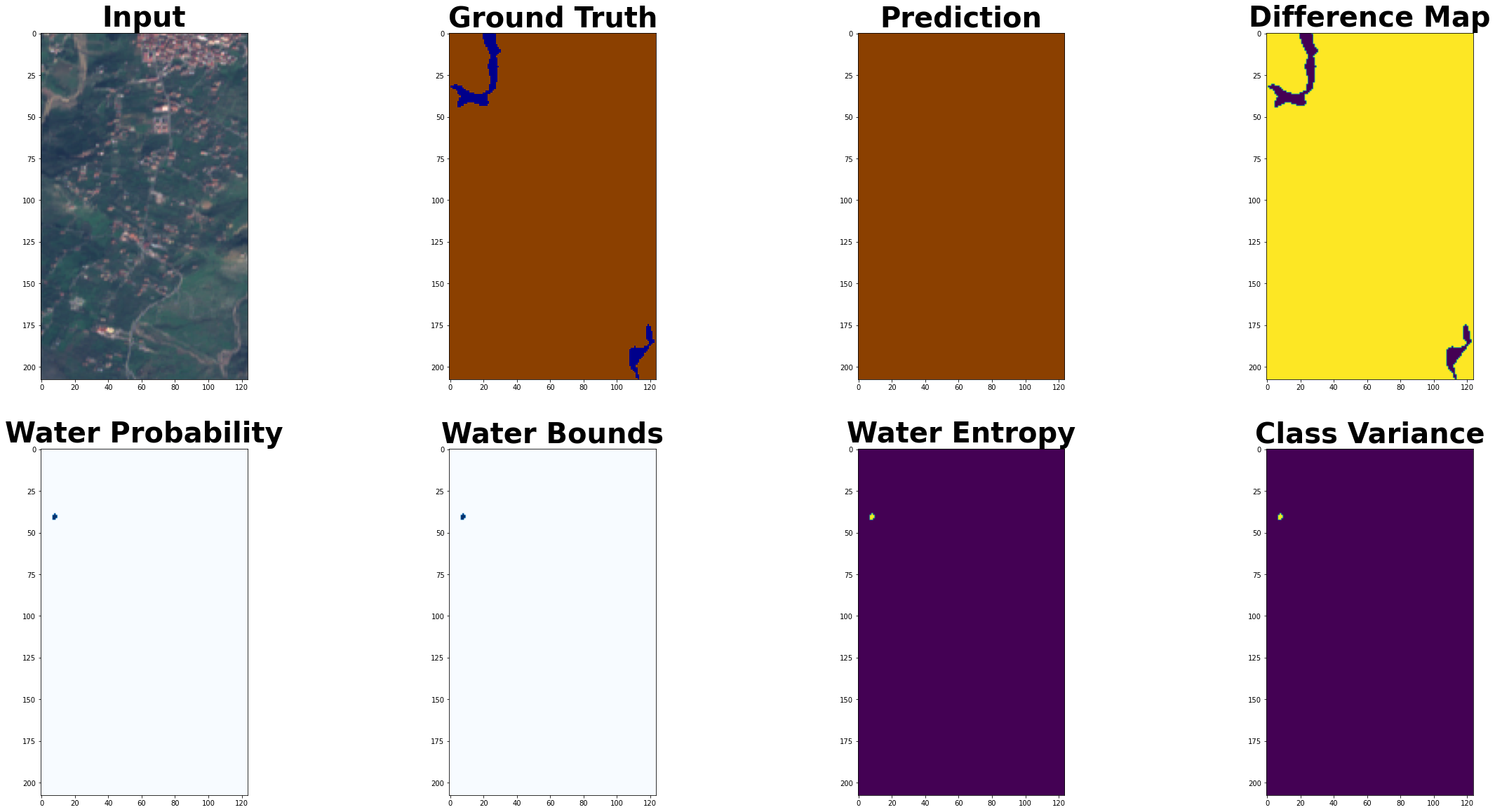
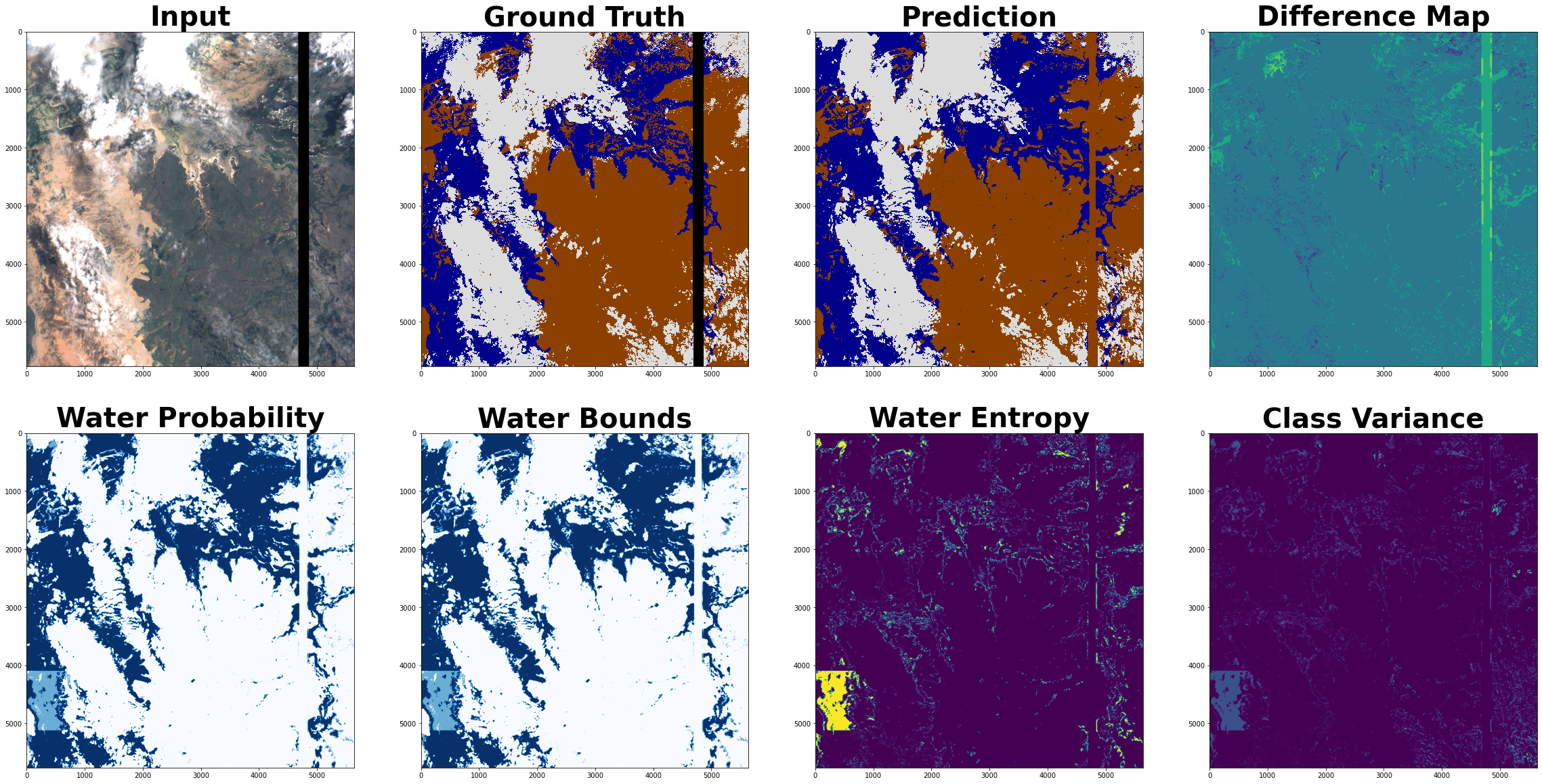
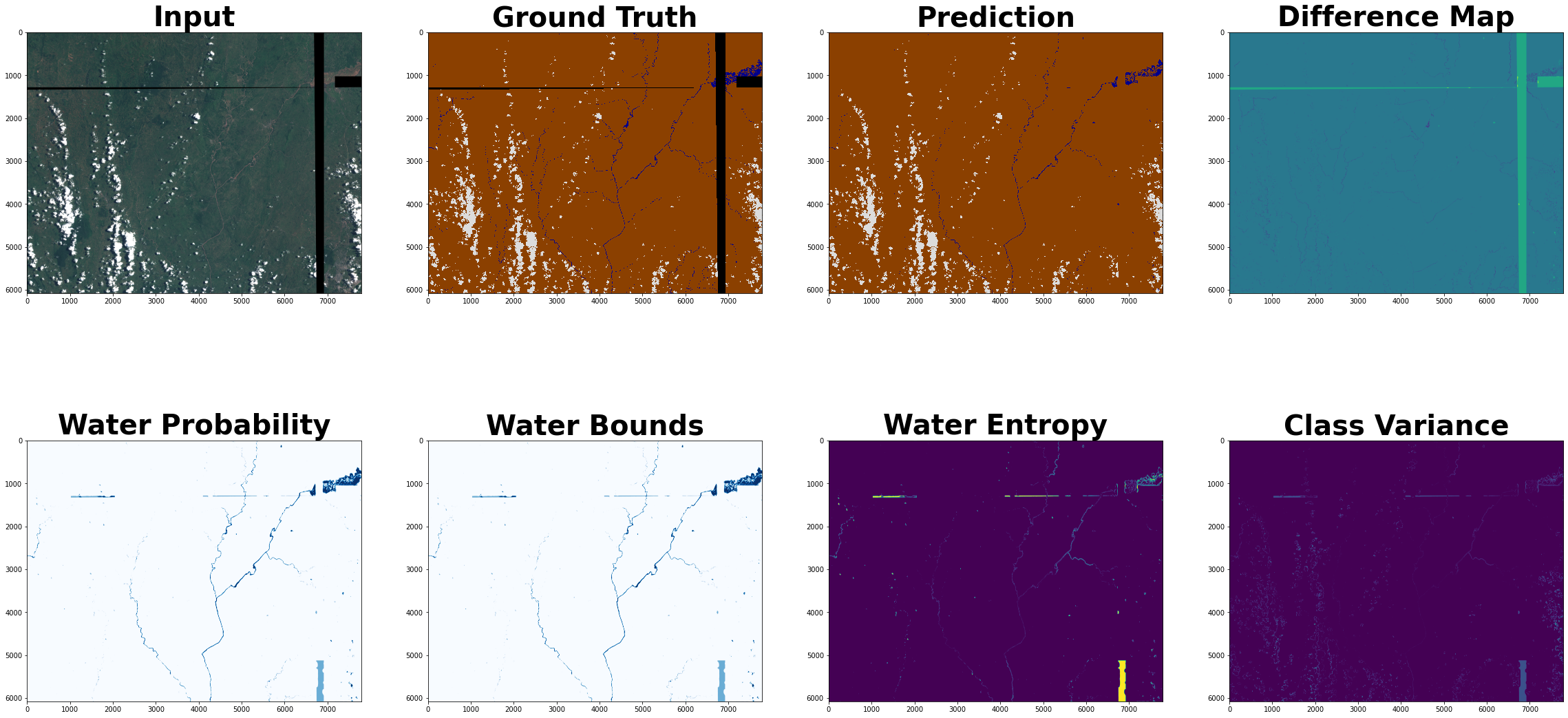
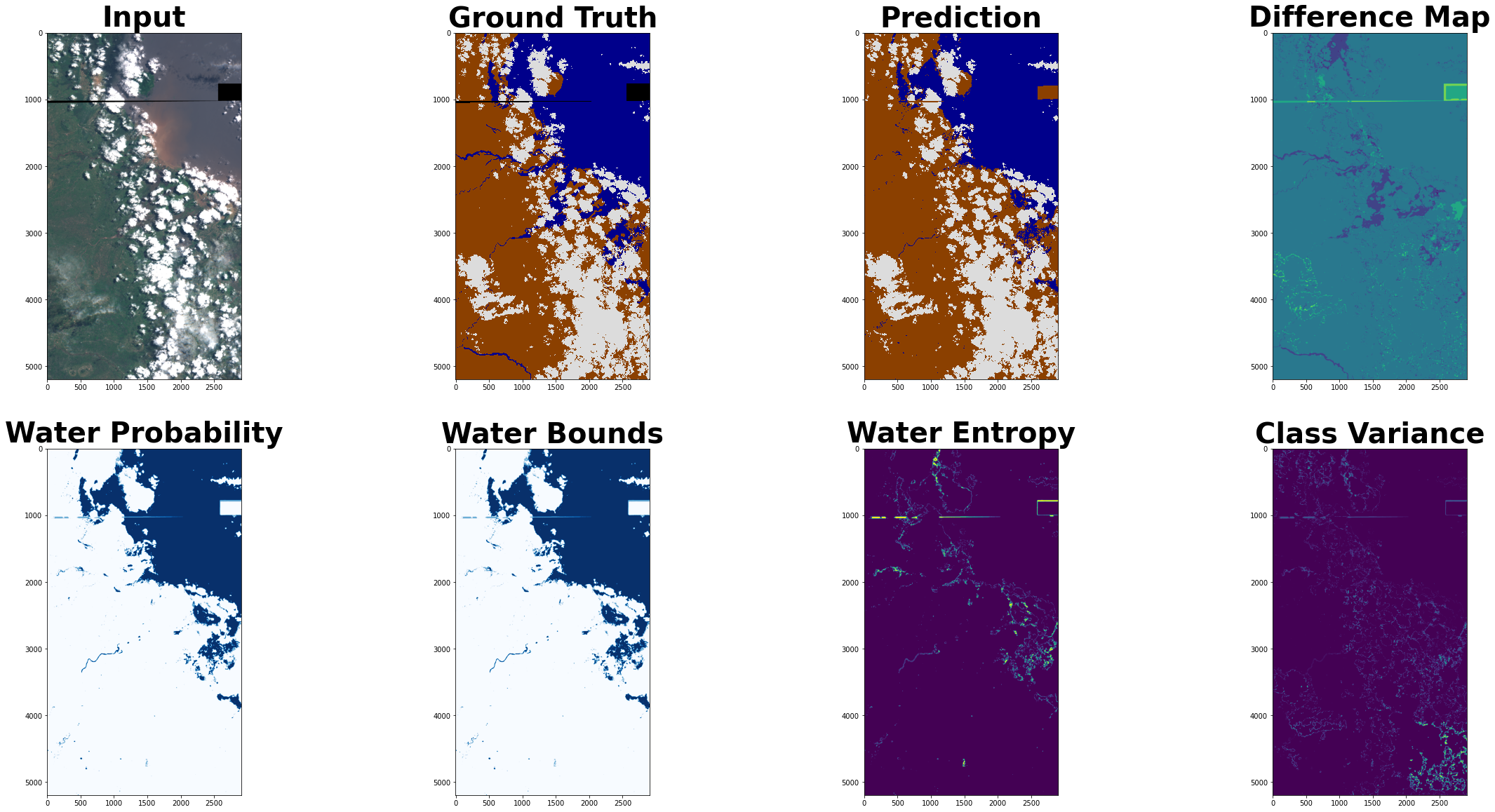
Step 5: Run probabilistic inference over dataset to show visual uncertainty of segmentations#
- compute_unecertainties function samples num_samples predictions from the model and builds several uncertainty maps for visualisation
from ml4floods.models.utils import uncertainty
uncertainty.compute_uncertainties(
dataloader=dl,
p_pred_fun=prob_inference_function,
d_pred_fun=det_inference_function,
num_class=config.model_params.hyperparameters.num_classes,
config=config,
num_samples=2
)
0%| | 0/11 [00:00<?, ?it/s]
Getting model inference function
Max tile size: 1024
Getting model inference function
Max tile size: 1024
9%|▉ | 1/11 [00:14<02:27, 14.78s/it]
18%|█▊ | 2/11 [00:16<01:04, 7.17s/it]
27%|██▋ | 3/11 [00:20<00:44, 5.60s/it]
36%|███▋ | 4/11 [00:27<00:44, 6.35s/it]
45%|████▌ | 5/11 [00:29<00:27, 4.51s/it]
55%|█████▍ | 6/11 [02:02<02:53, 34.65s/it]
64%|██████▎ | 7/11 [03:56<04:02, 60.59s/it]
73%|███████▎ | 8/11 [05:44<03:47, 75.81s/it]
82%|████████▏ | 9/11 [06:27<02:11, 65.55s/it]
91%|█████████ | 10/11 [06:30<00:46, 46.32s/it]
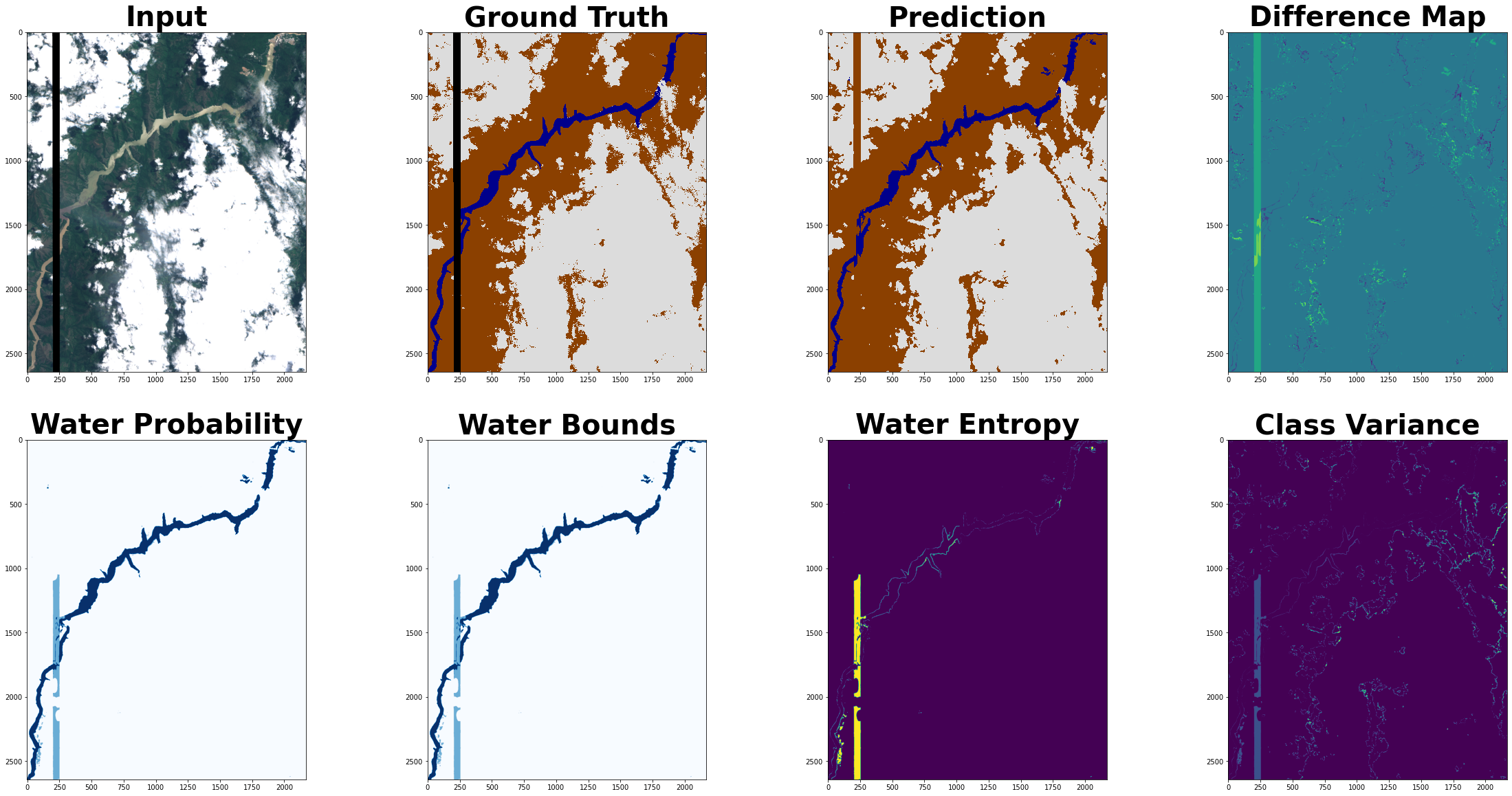
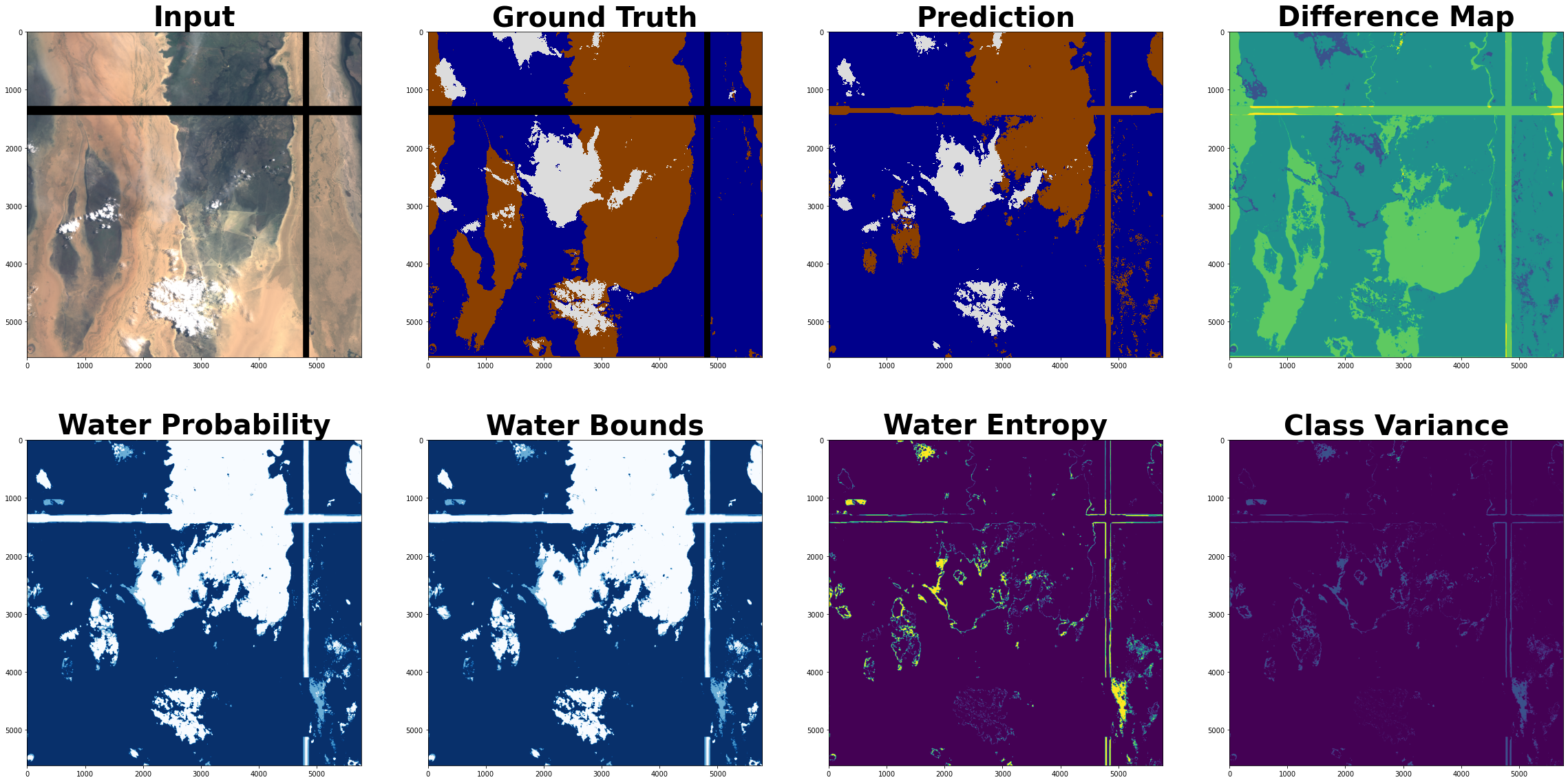
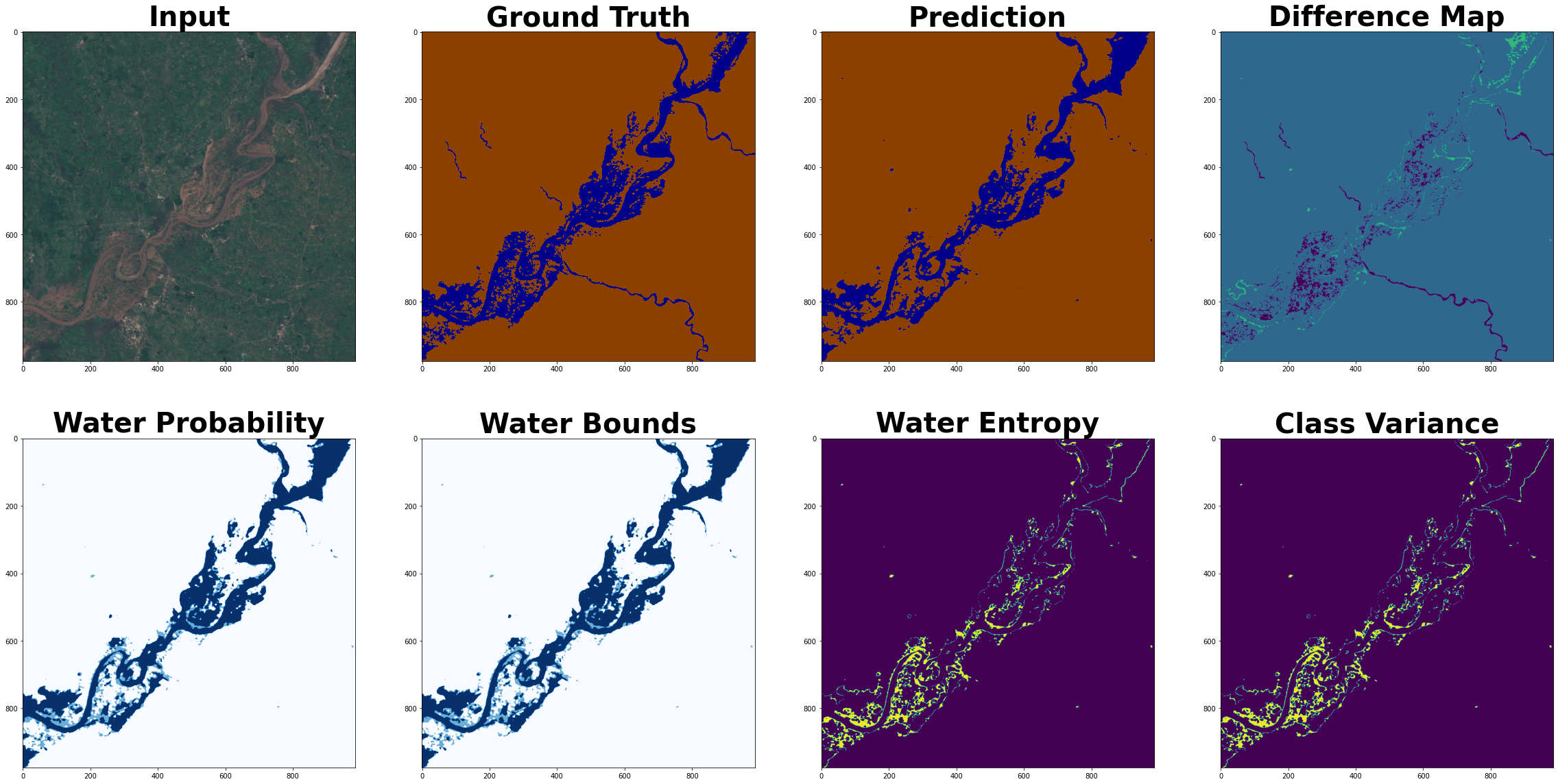
Step 6: Try it out on some new data!#
import rasterio
import numpy as np
from rasterio import plot as rasterioplt
import matplotlib.pyplot as plt
from matplotlib import colors
import matplotlib.patches as mpatches
from typing import Optional, Tuple, Union
import torch
from ml4floods.data.worldfloods.configs import BANDS_S2
@torch.no_grad()
def read_inference_pair(tiff_inputs:str, folder_ground_truth:str,
window:Optional[Union[rasterio.windows.Window, Tuple[slice,slice]]],
return_ground_truth: bool=False, channels:bool=None,
folder_permanent_water=Optional[str]) -> Tuple[torch.Tensor, torch.Tensor, torch.Tensor, rasterio.Affine]:
"""
Read a pair of layers from the worldfloods bucket and return them as Tensors to pass to a model, return the transform for plotting with lat/long
Args:
tiff_inputs: filename for layer in worldfloods bucket
folder_ground_truth: folder name to be replaced by S2 in the input
window: window of layer to use
return_ground_truth: flag to indicate if paired gt layer should be returned
channels: list of channels to read from the image
return_permanent_water: Read permanent water layer raster
Returns:
(torch_inputs, torch_targets, transform): inputs Tensor, gt Tensor, transform for plotting with lat/long
"""
tiff_targets = tiff_inputs.replace("/S2/", folder_ground_truth)
with rasterio.open(tiff_inputs, "r") as rst:
inputs = rst.read((np.array(channels) + 1).tolist(), window=window)
# Shifted transform based on the given window (used for plotting)
transform = rst.transform if window is None else rasterio.windows.transform(window, rst.transform)
torch_inputs = torch.Tensor(inputs.astype(np.float32)).unsqueeze(0)
if folder_permanent_water is not None:
tiff_permanent_water = tiff_inputs.replace("/S2/", folder_permanent_water)
with rasterio.open(tiff_permanent_water, "r") as rst:
permanent_water = rst.read(1, window=window)
torch_permanent_water = torch.tensor(permanent_water)
else:
torch_permanent_water = torch.zeros_like(torch_inputs)
if return_ground_truth:
with rasterio.open(tiff_targets, "r") as rst:
targets = rst.read(1, window=window)
torch_targets = torch.tensor(targets).unsqueeze(0)
else:
torch_targets = torch.zeros_like(torch_inputs)
return torch_inputs, torch_targets, torch_permanent_water, transform
COLORS_WORLDFLOODS = np.array([[0, 0, 0], # invalid
[139, 64, 0], # land
[0, 0, 139], # water
[220, 220, 220]], # cloud
dtype=np.float32) / 255
INTERPRETATION_WORLDFLOODS = ["invalid", "land", "water", "cloud"]
COLORS_WORLDFLOODS_PERMANENT = np.array([[0, 0, 0], # 0: invalid
[139, 64, 0], # 1: land
[237, 0, 0], # 2: flood_water
[220, 220, 220], # 3: cloud
[0, 0, 139], # 4: permanent_water
[60, 85, 92]], # 5: seasonal_water
dtype=np.float32) / 255
INTERPRETATION_WORLDFLOODS_PERMANENT = ["invalid", "land", "flood water", "cloud", "permanent water", "seasonal water"]
from ml4floods.models.model_setup import get_channel_configuration_bands
window = rasterio.windows.Window(col_off=1543, row_off=247,
width=2000, height=2000)
tiff_s2, channels = "gs://ml4cc_data_lake/0_DEV/1_Staging/WorldFloods/S2/EMSR501/AOI01/EMSR501_AOI01_DEL_MONIT01_r1_v1.tif", get_channel_configuration_bands(config.model_params.hyperparameters.channel_configuration)
torch_inputs, torch_targets, torch_permanent_water, transform = read_inference_pair(tiff_s2, folder_ground_truth="/GT/V_1_1/",
window=window,
return_ground_truth=True, channels=channels,
folder_permanent_water="/JRC/")
# Get probabilistic and deterministic inference functions
config.model_params.max_tile_size = 1024
prob_inference_function = get_model_inference_function(prob_model, config, apply_normalization=True, eval_mode=False)
det_inference_function = get_model_inference_function(det_model, config, apply_normalization=True, eval_mode=True)
uncertainty.compute_uncertainties_for_image_pair(
torch_inputs,
torch_targets,
prob_inference_function,
det_inference_function,
num_samples=10,
num_class=config.model_params.hyperparameters.num_classes,
config=config,
denorm=False
)
Getting model inference function
Max tile size: 1024
Getting model inference function
Max tile size: 1024